六分科技:满足智能驾驶要求的高精度定位解决方案
摘要:PPP-RTK的缺点在于在同等场景下与NRTK相比,定位精度较低;在智能驾驶领域进行GNSS高精度定位推广还需要各位硬件、算法和服务厂家的行业伙伴共同努力,以确保提供最好的高精度定位方案。
六分科技作为国内头部高精度定位厂商,公司技术研发、运维、数据解算等研发人员规模占比约80%,研发人员中本科及以上的学历占比约90%,其中硕士、博士占比超30%。
2023年6月14日,在2023第五届自动驾驶地图与定位大会上,北京六分科技解决方案专家胡功胜表示,技术的发展应用离不开场景,在L2-L4和V2X两大背景下,对车辆的高精度定位提出了不同需求。目前业内主流的智能驾驶高精度GNSS定位架构包括GNSS芯片、IMU、轮速计、定位引擎、偏转插件等。六分星璨PPP-RTK 通过引入精密轨道、钟差、码/相位偏差及大气延迟产品,提供快速收敛的、精度 厘米 级的精准定位服务。

胡功胜 | 北京六分科技 解决方案专家
以下为演讲内容整理:
作为国内头部的高精度定位厂家,北京六分科技自2017年成立至今,一直保持快速发展状态。六分科技以高精度定位技术为核心,致力于成为用户信赖的高精度定位解决方案厂家。
智能驾驶高精度定位应用场景
技术发展应用离不开场景。在自动驾驶L2和V2X两大场景下,车辆对高精度定位提出了不同需求。
以智能驾驶场景为例,车辆需要实现车道级的定位,确保全场景定位精度的保持。以V2X和车路协同等应用场景为例,很多车主在V2X上除了通讯功能,还需要高精度定位功能,以确保精确的位置判断,从而满足安全预警和车道级信息提醒等要求。
基于此,目前智能驾驶定位架构可能如下图所示,有GNSS+IMU+RTK的绝对定位技术,以及激光雷达和视觉等相对定位手段。
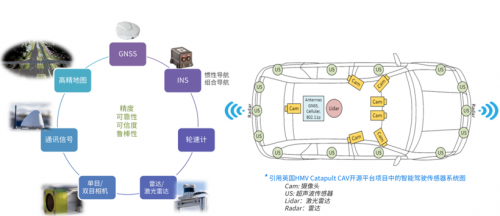
图源:六分科技
实际上,绝对定位和视觉定位属于传感器范畴,大家应该共同融合确保车辆按照主机厂要求满足不同场景的高精度定位需求。
智能驾驶高精度GNSS定位架构
六分科技聚焦于RTK服务,以RTK技术为核心,为用户提供高精度定位方案。我们将重点关注业内主流主机厂在智能驾驶高精度GNSS定位架构并做三种分类:
第一类是硬件层面,需要有定位芯片或GNSS模组,再加上IMU芯片或模组、包括车辆轮速计的接入,都属于硬件范畴。
第二类是需要车辆通过4G/5G通讯网络,从六分平台获取RTK数据服务。
第三类是至关重要的领域,即定位算法引擎。除了定位引擎外,国家出于安全考虑,车辆在量产前还需要集成偏转插件。当定位引擎输出算法并得出结果后,经过偏转插件加入一定量的偏转,最终得出位置信息。
目前主机厂的硬件架构略有不同,但所需要的硬件、软件、算法和服务要素大都如下图所示。
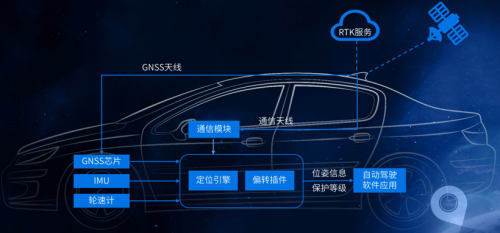
图源:六分科技
基于此,六分科技基于RTK服务、定位引擎及偏转插件的功能安全软件,我们称为Monitor,提供不同类型组合的解决方案来服务到主机厂、Tier1等客户。
关于六分星璨PPP-RTK
首先,我们来介绍下基于PPP-RTK技术的六分星璨产品。
PPP-RTK技术融合了PPP和RTK定位技术,通过引入精密轨道、钟差、码/相位偏差及大气延迟产品, 提供快速收敛的、精度厘米级的精准定位服务。相较于RTK服务,六分星璨具备服务端完好性监测,终端算法功能安全ASIL-B认证。
PPP-RTK的定位性能主要分为三个层面:
首先是定位精度层面,PPP-RTK六分星璨,在固定点下,收敛水平精度可达10-30cm。收敛时间在15s-50s。实际上,这取决于不同场景和实测结果。
其次是服务播发方式,PPP-RTK六分星璨支持通过4G或5G的通讯网络方式播发,同时支持通过Lband通讯iPad传递卫星方式解决车辆在无网或弱网区域下仍能接收差分定位服务功能。
第三点与安全相关,我们已经具备服务端完好性监测,包括终端算法层面的公共安全认证。
观察智能驾驶RTK技术的演进趋势,目前,主流OEM和其他场景使用NRTK会更多。我们从技术和商务两个层面对NRTK和PPP-RTK进行了对比。
首先,NRTK是区域级服务,其技术特点决定了它在广域区间内不需要建立太多基站。从服务数据来看,NRTK播发的是基于虚拟基准站点的原始观测量;PPP-RTK技术播发的是上述提到的5种类型的差分数据。因此,对NRTK技术来讲,车辆或其他终端在使用过程中受限于本身或车辆周边实际物理基站的性能,而PPP-RTK基站密度相对较低,范围更广。PPP-RTK可以根据服务数据内容,平滑地在PPP、PPP-AR、PPP-RTK服务之间切换。
RTK服务解决方案选择是客户和主机厂关心的重点。总体来看,NRTK技术优点在于——相较于PPP-RTK,NRTK定位精度更高,实现门槛更低。六分科技作为服务商,目前在全国建设了约3000个RTK基站,为用户提供稳定可靠的NRTK服务。另外,NRTK具备统一的标准协议,基于此在实现过程中,其软件架构会更加灵活。
NRTK的缺点在于目前国内服务商很难在国外建站,因此一定程度上它的使用更局限于国内。此外,由于基站数量众多,从工程化角度来看,很难从软件层面实现服务端完好性监控。目前主机厂提到功能安全,会首选PPP-RTK服务。
PPP-RTK的优点显而易见,一方面可通过与全球合作伙伴实现全球一体化方案,另一方面也满足服务端完好性监测和终端功能安全设计。
PPP-RTK的缺点在于在同等场景下与NRTK相比,定位精度较低;并且PPP-RTK技术相对成熟的供应商会更少些。而且PPP-RTK的算法和服务对硬件的算力资源要求更高。
六分科技的“Monitor + 安全插件”技术方案
为保障国家地理信息安全,所有商用地图类产品必须经过测科院的偏转加密算法进行偏转加密处理。由于地图进行了相应的偏转加密,车辆终端设备在量产或上路前需要集成由测科院提供的位置安全插件,以确保车辆终端的定位结果与地图匹配。
此外,车辆终端集成的位置安全插件会引入一些抖动。因此,主机厂、Tier1对功能安全有要求,需要对抖动进行估算。基于此,六分科技推出了“Monitor + 安全插件”的技术方案。
Monitor软件有四个主要功能:第一我们会监控位置安全插件的输入,保证其输入的有效性;第二监控位置安全插件的输出,保证其输出的有效性;第三监控位置安全插件的运行状态,包括阻塞、内存溢出等异常状态。第四也是最核心的,Monitor软件会同步实时输出由位置安全插件产生的位置抖动误差的保护等级。
基于这四个功能,当车辆集成高精度定位能力,经过偏转插件后,我们仍会对引入的抖动进行有效预估,以确保定位过程的功能安全。除此之外,Monitor软件从概念设计到系统设计,再到单元测试,最后到系统集成测试等,所有流程都遵循ASPICE (Level 2) 开发流程,符合ISO26262 (ASIL-B) 功能安全等级要求。
目前,我们的产品已经在其他Global的OEM进行量产交付。
总结与展望
对智能驾驶而言,高精度定位是个系统工程,要达到非常好的效果,需要包含三个方面:
第一个方面是至关重要的GNSS硬件。目前我们进行高精度定位时,硬件架构种类非常丰富,例如,基于全部域控形态或基于域控+P-box形态,这涉及到我们与主机厂进行整体硬件架构设计。同时关于GNSS芯片或模组的选择;关于IMU性能和集成方式;GNSS天线选型,当我们选好天线后,还需关注整车天线布置和硬件终端摆放。
第二个方面是定位引擎和算法层面。对于算法,各主机厂有不同的考量,有些希望服务商或算法提供商能将组合导航算法实现;有些只需要RTK算法关于算法由谁负责,以及深耦合和松耦合问题,客户需要结合自身硬件和算力资源进行综合考虑。此外,也需要考虑是否需要支持功能安全,以及算法输出的定义格式等方面的技术要求。
第三个方面关于位置服务领域,我们要确定是需要PPP-RTK服务,还是需要NRTK服务。包括统一坐标系的框架和历元,我们需要确定是部署专有服务平台,还是直接接受服务商提供的公有服务。此外,在量产车发布后,服务账号将采用何种方式进行激活等,都需要明确。在智能驾驶领域进行GNSS高精度定位推广还需要各位硬件、算法和服务厂家的行业伙伴共同努力,以确保提供最好的高精度定位方案。
(以上内容来自北京六分科技解决方案专家胡功胜于2023年6月14日在2023第五届自动驾驶地图与定位大会发表的《满足智能驾驶要求的高精度定位解决方案》主题演讲。)
责任编辑:枯川



网友评论