理工雷科电子王兆丰:汽车智能驾驶测试的需求与解决方案
摘要:随着智能驾驶产品的研发与量产的增速,日常生活中会看到自动驾驶或高级辅助驾驶测试车辆在道路上行驶,除了在开放的道路场景内,自动驾驶车辆还会在封闭场景中进行相关测试。
6月15—16日,由江夏区人民政府、盖世汽车主办、江夏科技投资集团有限公司承办的2023第六届自动驾驶与人机共驾论坛上,理工雷科电子(天津)有限公司网联测试产品线产品经理王兆丰介绍,智能驾驶仿真测试包括场景环境、传感器、控制器、车辆四种元素,分为五个级别:一是Level 1完全基于电脑来进行算法的验证;二是Level 2增加传感器信号设备,场景和车辆动力学仿真在实时仿真机运行,确保系统实时性;三是Level 3在Level 2基础上部分传感器使用真实部件;四是Level 4场景仿真和车辆动力学仿真软件联合仿真Level4以真实车辆反馈的轮速、车轮转角等作为输入,输出行驶阻力和转向阻力,通过转毅反馈真实车辆实现车辆在环测试(VIL);五是Level 5使用真实车辆在真实的道路上行驶,实现车辆真实道路测试。

王兆丰|理工雷科电子(天津)有限公司 网联测试产品线产品经理
以下为演讲内容整理:
智能驾驶测试的需求与作用
随着智能驾驶产品的研发与量产的增速,日常生活中会看到自动驾驶或高级辅助驾驶测试车辆在道路上行驶,除了在开放的道路场景内,自动驾驶车辆还会在封闭场景中进行相关测试。在封闭场景中,经常会出现一些假人和假车,在测试过程中也充满了坎坷,假人和假车的测试场景也较为“惨烈”。
智能驾驶测试系统包含四个组成要素,场景环境、传感器、控制器和车辆,基于此可以对智能驾驶测试进行相应的分级,进行仿真状态模拟测试。在测试过程中,测试对象是智能驾驶系统,分为三个部分:一是感知,即传感器;二是决策,即控制器;三是执行器,即车辆仪表显示和侧底盘结构,动力系统、制动系统等。
随着测试的逐渐升级,控制器将从仿真状态转化为实物状态。并且会针对模拟器HIL的测试场景,进行传感器实物测试叠加,结合虚拟场景和整车动力学模型不断升级,最终将真实车辆搭载ADAS系统,引入测试环境,用于仿真模拟测试。
下图展示了智能驾驶测试系统的标准V型开发流程,左侧是软件在环 (SIL)测试,针对策略算法和等效验证方式进行仿真测试。硬件在环 (HIL),主要针对传感器,进行半实物仿真测试。整车在环(VIL)是基于模拟仿真场景,对整车及被测智能驾驶系统进行整车级闭环仿真测试。
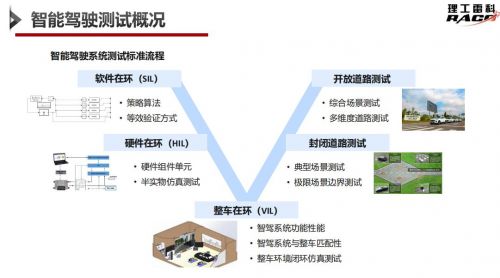
图源:演讲嘉宾材料
我们对模拟仿真测试或智能驾驶测试的现状进行了总结。首先,模拟仿真测试技术已经成为智能驾驶系统研发、测试等环节中不可或缺的技术手段;其次,智能驾驶应用通过模拟仿真技术,可以扩大模拟仿真测试环境的应用边界。基于已有测试系统进行模拟仿真技术的导入,不仅可以扩大测试系统的能力,还可以提高测试效率。
模拟仿真测试对产品开发质量和周期具有关键作用,在测试过程中,引用相应的模拟仿真测试手段,可以极大提高产品质量,缩短测试周期。在进行模拟仿真测试推广过程中,前期我们对客户进行了基础引导和培养,近期市场也给予了我们一定的反馈,这些新的建议或需求,会在无形之中促使模拟仿真测试或智能驾驶技术的迭代,形成良性的循环发展模式,并且模拟仿真测试也是自动驾驶系统、高级辅助驾驶系统等产业落地的关键项目。
目前所有的模拟仿真测试系统都具备丰富的环境资源,理论上具有无限丰富的特点,但一些极端场景,加大仿真测试占比。我们对特殊场景和极限场景的测试进行反复验证,无形之中提高了测试的效率和针对性。所以智能驾驶车辆必须经过大量模拟仿真测试和路测,才能实现真正的产业化。
随着智能驾驶汽车研发、制造以及量产的增速,客户端及市场对于智能驾驶产品测试领域提出了更高的要求。在质量方面,测试环境是客户针对产品的验证,需要在验证过程中提供标准测试环节。并且在标准测试环境下,其数据和结果准确度都有相应的要求;在成本方面,由于后期的路况测试会投入较多,所以降低开发测试成本也成为了重要的需求点;在交付方面,智能驾驶测试都有一个管控周期,特别是商用车,驾驶速度和休息时间都有规定,因此在进行里程累积测试时,会有固定的测试周期。所以如何缩短开发周期,提高测试效率也成为未来的发展趋势。
基于市场反馈的信息,针对智能驾驶产品测试系统功能需求进行了分析:一是传感器模拟仿真,在感知层面上,传感器仿真能力的构建是模拟仿真测试系统的基础,随着多传感器的融合,也要提高系统测试覆盖性;二是复杂交通场景,在测试过程中构建复杂的交通场景,是为客户提供智能驾驶系统便利化的重要着眼点;三是测试管理数据分析,布局一些交通事故场景的数据库,可以在测试过程中按需求调用相应的比例。
测试管理平台、数据分析等都是测试系统的基础功能,但测试系统还需要具备全自动的管理功能,以及相应的应用能力的建立。特别是针对自动化测试流程、测试数据分析等,最后实现测试数据的资源分析共享。
模拟仿真测试的技术方案
理工雷科电子自主研发了一款针对智能驾驶测试的技术方案,包含了搭载被测物智能驾驶系统的车辆,还布局了相应的传感器模拟子系统,比如视觉目标模拟系统、毫米波雷达目标模拟、道路环境模拟系统等。为了实现系统中各传感器的模拟仿真同步性,系统利用实时机控制系统、交通场景模拟仿真系统,对测试管理系统进行监测及控制。
这套系统主要实现功能是系统传感器在环智能驾驶域硬件的仿真测试,特别是ADAS功能,比如FCW、AEB、ACC、TSR等,可以独立进行复杂交通场景模拟。支持智能驾驶域控制器HIL功能测试评估,并且还支持系统功能升级扩展,可以实现视觉传感器模拟仿真、超声波传感器回波仿真、以及V2X车联网通信测试。
下图是模拟仿真测试系统的框架,左边是针对传感器布局的子系统模块,最上面是针对视觉感知传感器的模拟子系统,通过搭载高算力处理器的图形工作站,将交通场景模型中的视觉模拟视频进行描画,再通过高清激光投影仪,投影到弧形幕布上。中间部分是毫米波雷达目标模拟器,这款模拟器是理工雷科电子独立自主研发的,该模拟器可以模拟相应的毫米波雷达探测目标的回波以及目标数据。我们还搭载了整车台架和测功机,与整车的半轴进行连接,模拟环境道路的反馈以及转弯状态。系统可以通过实时控制系统进行环境控制,使系统内部各个模拟子系统的目标模拟实现时间轴同步。

图源:演讲嘉宾材料
在感知模拟方面,我们有视觉传感器目标模拟器和毫米波雷达仿真测试模拟器,其中毫米波雷达仿真测试模拟器支持3D和4D毫米波雷达目标的模拟。在这个测试系统中,可以实现针对ADAS的功能验证测试,比如自动紧急制动AEB、前向碰撞预警FCW、车道偏离预警LDW等。基于虚拟仿真场景,可以生成各种天气情况、各类型交通参与者、不同类型车道线等复杂工况及场景要素,以满足客户的测试需求。
下图是对ACC功能测试的应用案例,可以明显看到左侧车辆对搭建环境中的目标进行了有效识别,ACC作为1V1R架构下,ADAS系统典型纵向控制功能,其功能模拟仿真测试的实现,可以体现系统对视觉感知、毫米波雷达探测目标的模拟应用都非常准确,且系统模拟仿真测试能力非常完备。其他应用案例还包括AEB功能模拟仿真测试、LDW功能模拟仿真测试、TSR功能模拟仿真测试等各种ADAS功能的验证。

图源:演讲嘉宾材料
发展概况及未来布局
我们理工雷科电子天津有限公司,是雷科防务旗下北京理工雷科电子信息技术有限公司,投资设立的高科技研发型企业。民品方向的主营业务包括智能网联系统产品线和网联测试系统产品线两部分。
我们的智能网联产品线于2021年正式成立,基于北理工丰富技术的积淀和背书,其产品成熟度较高,已成为国内一流的自动驾驶系统设备测试测量产品及解决方案供应商。前期布局了毫米波雷达测试系统设备及解决方案,目前市场占有率也较高,所以第二阶段还是以ADAS智能测试系统及仿真模型技术为主,推进相应产品。
未来将重点维护和创立自有模拟仿真测试系统,以及提供海量场景库数据,随着市场的发展趋势,我们会不断提升自主研发能力,为行业提供更多更好的应用产品。
(以上内容来自理工雷科电子(天津)有限公司网联测试产品线产品经理王兆丰于2023年6月15—16日,由江夏区人民政府、盖世汽车主办、江夏科技投资集团有限公司承办的2023第六届自动驾驶与人机共驾论坛发表的《汽车智能驾驶系统整车在环模拟仿真测试解决方案》主题演讲。)
责任编辑:枯川
-
莱迪思推出Lattice Drive™解决方案集合加码汽车业务
-
安得智联汽车供应链解决方案,助力企业业转型升级
-
威巴克汽车NVH解决方案重庆新工厂开业
-
业界最低功耗 三星宣布量产汽车UFS 3.1内存解决方案
-
Qcarlink车联网软件接入平台解决方案产品确认申报2023金辑奖·中国汽车新供应链百强
-
欣旺达王慧敏:欣旺达动力闪充电池解决方案
-
TTTech Auto与ZettaScale合作推出Zetta Auto: 实现车载和V2X通信的统一解决方案
-
地平线与安波福签署深度战略合作协议 提供整车软硬件解决方案
-
六分科技:满足智能驾驶要求的高精度定位解决方案
-
indie Semiconductor推出新汽车无线充电解决方案








网友评论