无图智驾趋势崛起:氪金玩家不再重度花费
摘要:一方面,我们能看出高精地图对当时的NOA功能正常运行有着核心作用,另一方面,高精地图的缺失也影响着NOA功能的降级或接管次数。
“当前路段高精地图受限,系统降级为LKA模式。”

这是我们年初在测试某款车高速NOA功能时,常常碰到的现象。
一方面,我们能看出高精地图对当时的NOA功能正常运行有着核心作用,另一方面,高精地图的缺失也影响着NOA功能的降级或接管次数。
当各家车企在智驾领域的探索走到了城市NCA的路口,风向却转向了“去高精地图”,大家陆陆续续宣布进入“无图时代”。

问题来了:
面向更难的路况,为什么反而减配?
离开曾经的“必需品”,现在的无图智驾是怎么实现的?
到底是有图好还是无图好?
这得先从高精地图上车讲起。
一、车载高精地图,出道即巅峰
2018年6月的亚洲CES上,凯迪拉克正式在中国发布Super Cruise TM超级智能驾驶系统,首搭于凯迪拉克CT6 40T铂金版上。
如果有人看过这台车的宣传广告,那大概会对广告主题“放手去做”还有印象,这在当时是一个非常激进的描述。
 截取广告画面:行车中脱手方向盘
截取广告画面:行车中脱手方向盘
虽然不是真正意义上的可脱手智驾,但由于高精地图的加入,车辆可以识别出车道线并沿线行驶,某段路程在某种条件下确实可以不人为干预。这套智驾方案就是全球首个高精地图数据应用方案。

发布在中国的原因包括其合作伙伴是国内首批钻研高精地图的企业——高德。
高德从2014年就开始研究高精地图,和我们日常使用的导航地图不同,高精地图的技术壁垒更大,它具有精度高、信息元素丰富等特点。
在高精地图的加持下,车辆可以提前接收到前方路段的车道线、交通标志、护栏、下水道口甚至是车道的坡度、曲率等信息。
最关键的是,高精地图有准确的坐标。举个例子,大家使用普通导航时经常到达目的地附近时系统就结束服务,然而高精地图作为领航辅助功能的有力推手,可以精准到亚米级(1米以下分辨率,甚至是毫米),对匝道口这样稍有偏颇就汇入失败的路口也能拿捏并精准驶入。

这样精细的地图采集起来自然也是相当困难,主流采集方式有移动测绘车采集、无人机航测和1:500地形图测绘,这几种方法的难点和周期不同。
国内主流图商基本都采用移动测绘车采集:搭载了激光雷达、摄像头、RTK测量仪等设备的工作车亲力亲为,来到目标路段记录下这里的每一个信息再后期集成,这无法走捷径,且人力、物力(一台采集车成本就上百万)的成本极大,所以高精地图也是出了名的“贵”。
 工作车
工作车
根据《智能网联汽车高精地图白皮书》显示,分米级地图的测绘效率约为每天每车500公里道路,成本为每公里10元左右,而厘米级地图约为每天每车100公里道路,成本为每公里千元上下。
除了贵以外,高精地图还有个问题就是鲜度。更新慢导致了NOA功能实际体验时会出现一些问题,例如原本的虚线后来被刷为实线,未更新的高精地图就会带着系统“实线变道”,包括临时施工路段也在它应对能力外。

但无论如何,高精地图给出的先验信息对智能车来说无疑是考试前的提前泄题,对车辆的规控决策起着积极作用。
在施工路段这一场景的弱势,车辆也可以利用实时感知硬件与算法补充,例如阿维塔11就可以识别桩桶成功避障。
个人认为,高精地图的部分缺陷完全不会影响它的“百般好处”,至于“贵”这个问题,也没影响众多企业对它趋之若鹜,例如小鹏汽车在2021年斥巨资2.5亿收购智途科技试图自主掌握高精地图技术。

然而高精地图的门槛不是愿意砸钱就能进,还得拿到国家颁发的“导航电子地图制作甲级资质”。
资质本来就挺难拿,滴滴事件后政策再次收紧,目前全国仅19家通过审核,小鹏旗下的智途科技不在其中。

这意味着,想用高精地图推进NOA功能的实现,就得和有一定垄断地位的地图商合作,交上一大笔钱,堪称氪金作战。
这个状态一直到去年都还维持的不错,高速NOA的普及将高精地图推上风口,高精地图为高速NOA注入强大能量。

从背后的进程来看,一方面政策允许,另一方面高速路况相对简单,2022年全国高速路段里程为17.1公里,这个里长的成本还算可控。然而随着城市NCA的推进,一些“去图”的声音愈加响亮起来。
二、去图
目前我国综合交通运输网络总里程超600万公里,城市道路里程超高速路段几十倍,这意味着使用高精地图的成本至少翻了几十番;同时城市路段的复杂程度也远超高速路段,单是一条街两旁的商铺、环境设施就够好一顿操作;另外城市变更的频率更快,对鲜度要求更高。

综合来看,如果城市NCA想倚仗高精地图,就得接受极高的成本和缓慢的交付速度,前文中提到的政策也是一座大山。
2022年8月,自然资源部公布了北京、上海、广州、深圳、杭州、重庆六个城市开展智能网联汽车高精度地图应用试点。目前为止,未继续开放。如若依赖高精地图,何时能开通全国城市NCA则极其被动。
于是,一大波“无图智驾”走上舞台中心。
三、攻克无图
两个视力正常的人,在同一环境下吸收到的信息量不同,这就是“硬件”能力在发挥上的差距。所以没有了高精地图这位“提前指点的大师”,各家车企想做好无图智驾,就要先在即时感知能力方面下功夫。
用感知硬件去抓取车道线、红绿灯等规则静止信息对合格的智驾玩家来说并不难,难的是实时与其他道路参与者博弈,例如行人、车辆以及其他障碍物。

以业内顶流华为ADS为例,在感知层面华为ADS首创了GOD(通用障碍物检测)网络,并融入到AEB功能。
传统的AEB实现方式为提前在系统中设入障碍物信息,通过对道路上可能出现的物体进行大量AI网络训练,使车辆能够识别并判断障碍物类型,接下来触发避让指令。
相应的问题则是现实中的障碍物类别远超系统中的障碍物名单数量,所以路遇系统没录入过的障碍物,AEB就也不会了。
即使是录入过的障碍物,如果以奇怪的角度呈现,那AEB可能也反应不过来,我们此前做AEB测试时,同一台车同一速度面对正放的静止车和斜45度的静止车都会表现出差异。

同时,由于需要判断出类别才能触发指令,相应的决策时间也会拉长。
而融入了GOD算法的“GAEB”则采取了“快刀斩乱麻”的战术。
相较于传统AEB是在视野中将物体一个个框起来再检测的方式,GAEB直接将视野中的画面全纳为侦测范围,将这个范围划分成小格。
再扫描这个格子范围内是否被物体占据,移动或是静止。所有格子确认完信息后,系统直接避让有障碍物信息的“被占据格子区域”,划分出能正常通行的“空闲格子区域”。
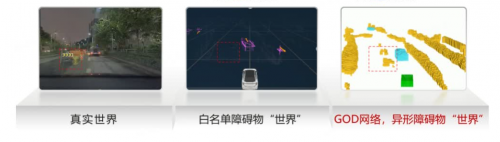
这样的好处就是不受录入信息量的限制,能应对更多障碍物场景,也许没识别出来障碍物是什么,但是发现这玩意儿挡路了,得避开,听起来非常“人性化”。
实际反应也更快,毕竟看见障碍物就躲开,比起看见障碍物非要倔犟地认出是什么,没认出来就不踩刹车,显然前者更聪明。
在GAEB技术的加持下,华为ADS面对倒地的大树、落石以及车门大敞的静止车等其不规则障碍物,都可以实现刹停避让。

这套感应系统使用到的硬件包括激光雷达、毫米波雷达和视觉数据多传感器,激光雷达在其中起到了很大作用,实现多模态融合、抗日光灯光、精准识别距离。
在了解道路信息的基础上,又有精准识别障碍物的能力,能开、能变的前提条件已经达成,就需要训练即时决策能力。
在有高精地图的情况下,哪里是实线、哪里是虚线都早已标注好,没了高精地图就得传感器实时一边看车道线一边观测周边来车,还得记着路线。
举个例子,离右转路口还有不少距离时是牺牲通勤效率先变至慢车道方便后续右转还是临近时再右转?要是错过了虚线区又有变道需求,到底是实线变道还是错过路口,这都需要“汽车大脑”给出自己的判断。
每日通行,也可称得上失之毫厘差以千里,如果请教老司机驾驶技术,他除了传授一些规矩经验以外,可能还会用“感觉…的时候就…”来表达,机器也是一样,决策无法按公式框架输出。
华为ADS的方式就是通过自动驾驶开发平台大量进行仿真测试,给车辆更多的应对经验,学习“不能做什么”,比如某种数据推动下测试结果为碰撞,那么实际路况时就摒弃该方案,有些像我们玩电子游戏的过程。
同时想出众多方案并选择一种最好的,面对欲加塞车辆时点刹避让还是加速跟进前车拒绝加塞。
当然,方案要好还要快。由于去图,临时信息让规控和决策的时间更加紧张,经验数据、硬件能力、软件逻辑缺一不可。“闭卷考试”下,技术水平更能见真章。
最后
其实大家不难发现,从功能实现上来说,高精地图对智驾一定是有大利的,先验信息简化了功能开发,弥补了感知能力,为规控提供了支撑。

而无图智驾则是氪金玩家们不再氪金,转为纯技术战士,降成本,也摆脱了供应商和政策的限制。
但如果有一份现成的高精地图摆在车企面前,大概率对方也很难拒绝。同样步入无图时代的小鹏汽车对高精地图就是“爱而不得”的态度。
今年3月,首次当选新一届全国人大代表的小鹏汽车董事长何小鹏在两会上就提出建议:进一步优化、简化高精地图审核流程,缩短高精度地图从采集到使用的周期,加快高精地图基础设施进程,为我国自动驾驶行业发展保驾护航。
听起来有些官方,但其实也很好理解何小鹏对于高精度地图的认可。毕竟一旦降本、政策放开,再以感知能力补足,高精地图还有什么缺点呢?
但由于各种复杂元素,高精地图仍是奢侈品。智驾的未来似乎也掌握在采取人类般临时反应思维的方案商手中。
总之,无图的兴起给了智驾领域玩家新一轮超车的机会,普及速度、功能体验和价格下探将掀起新一轮的市场大洗牌。
责任编辑:苏城










网友评论