西北机电工程研究所发明增强6D姿态估计新方法 有望实现更好的机器人物体与物体的交互
盖世汽车讯 据外媒报道,中国咸阳市西北机电工程研究所(Northwest Institute of Mechanical and Electrical Engineering)的研究人员在6D物体姿态估计方面取得进展,并已将相关论文发表在期刊《International Journal of Computational Science and Engineering》。
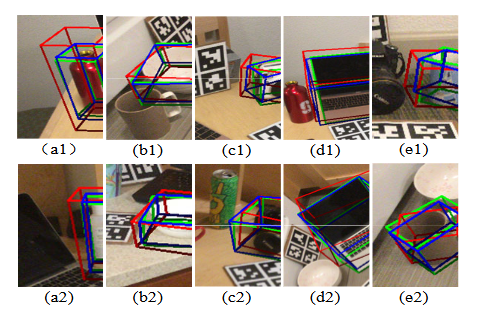
图片来源:期刊《International Journal of Computational Science and Engineering》
这一最新研究对推进机器人技术、增强现实(AR)、虚拟现实(VR)以及自主导航具有重要意义。论文中称该方法可以提高从单个图像确定物体旋转和平移的准确性、泛化能力和效率,从而可以显著提高机器人与物体交互的能力,尤其是在动态或受阻环境中。
在机器人技术中,6D物体姿态估计是指确定物体在三维空间中的方向(旋转)和位置(平移)。“6D”描述了六个自由度:三个用于平移(X、Y、Z轴),三个用于旋转(围绕这些轴)。准确的姿态估计对于自主系统(包括机器人和AR/VR系统)至关重要。
由于物体形状、视点和计算需求的变化,挑战也随之而来。当前的方法依赖于深度学习技术,使用从各个角度观察的大量物体数据集。这些模型很难处理看不见的物体或形状与训练数据不同的物体。
中国咸阳市西北机电工程学院的Zhizhong Chen、Zhihang Wang、Xue Hui Xing和Tao Kuai讨论了新技术,通过将旋转不变特征纳入人工智能系统(称为3D卷积网络)来解决各种挑战。
这使得系统能够处理物体的3D点云,而不管其方向如何,即使物体旋转或从不熟悉的角度看,也能更准确地预测姿势。网络使用一组一致的坐标,称为规范坐标,它们表示不受旋转影响的参考系中的物体。这项创新提高了系统推广到新姿势的能力,克服了传统方法的局限性。
新方法不仅更准确,而且更高效,因此需要更少的训练数据和更少的计算机能力,使其更适合实时、现实世界的应用。
网友评论